Code
Implemented / contributed to the following repositories: Scroll to Datasets
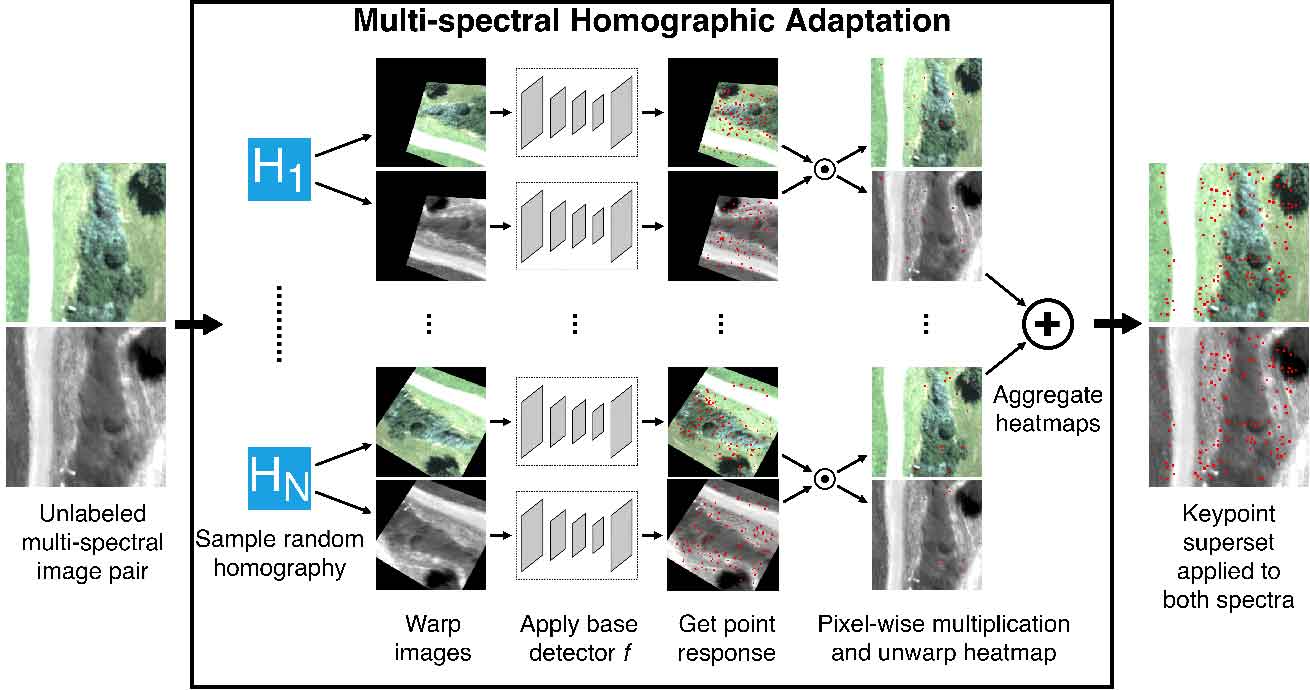 |
multipoint MultiPoint: Feature detector and descriptor for optical/thermal image alignment. |
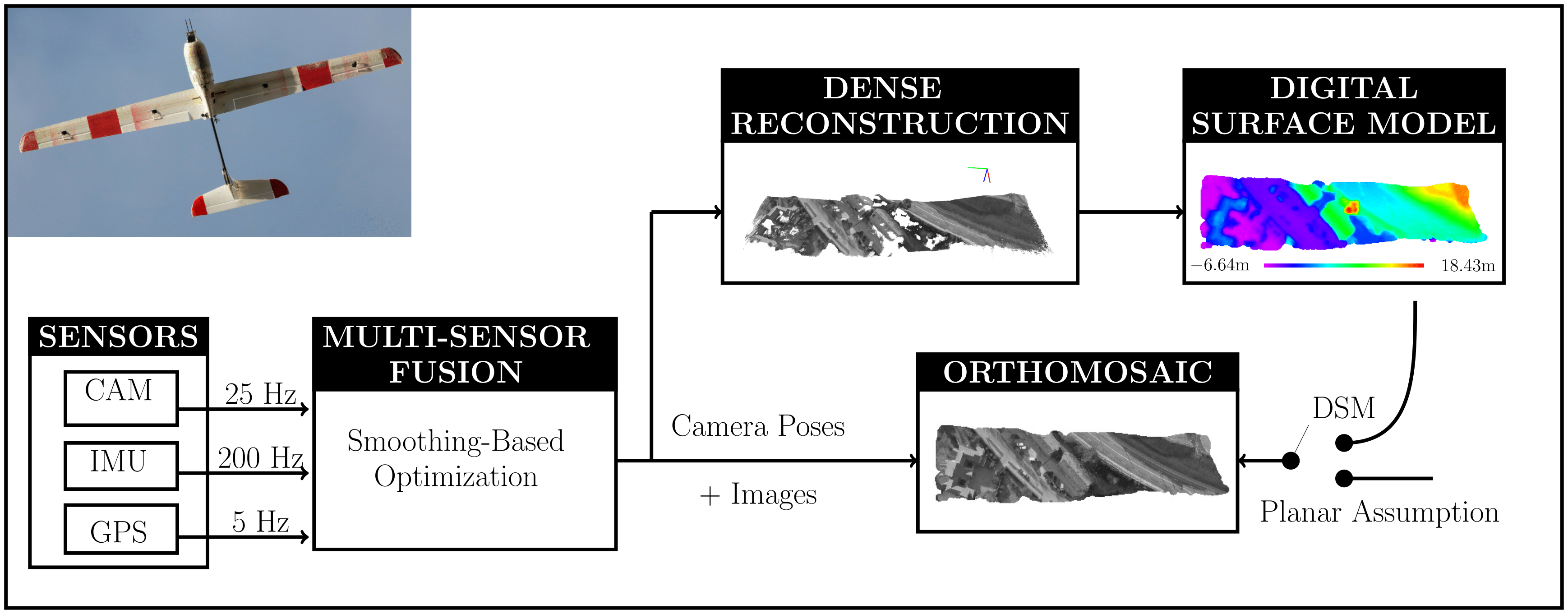 |
aerial_mapper A library containing basic code to generate geo-referenced dense point clouds, digital elevation models, and orthoimages. |
 |
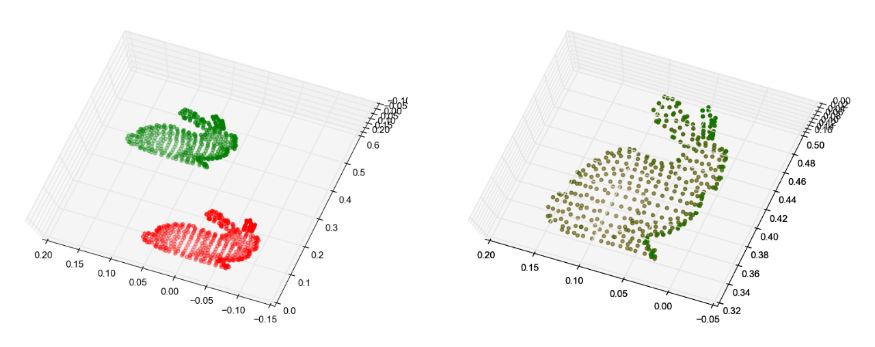
robust_point_cloud_registration A library containing the source code for point cloud registration using iterative probabilistic data association method. It contains wrappers for other point cloud registration methods. |
 |
aslam_cv2 A library containing commonly used functions for computer vision algorithms and data containers such as camera or distortion models. |
 |
maplab A framework for visual-inertial mapping and localization. |
 |
kalibr A toolbox for the intrinsic and extrinsic calibration of a or multiple cameras, the spatial-temporal calibration of a camera-IMU setup, and IMU-IMU calibration. |
 |
Pose-Graph Optimization Python implementation of "A Tutorial on Graph-Based SLAM", (Alg. 1). |
 |
Standard ICP Python implementation of standard ICP. |
Datasets
Scroll to Code
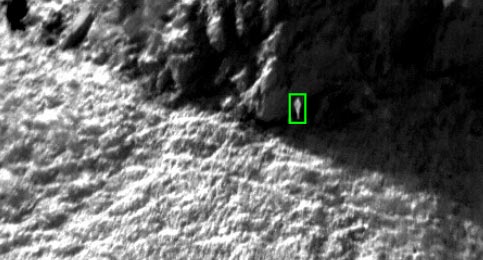 |
Optical-Thermal-Infrared Human Detection Datasets (released soon) The datasets have been collected by a fixed-wing and a rotary-wing UAV in realistic search-and-rescue scenarios. All datasets are annotated with bounding boxes. |
 |
Multispectral (Optical-Thermal) Image Pair Dataset The data was collected using a fixed-wing UAV equipped with two downward facing cameras in ten flights at different times of the day. The RGB camera is a UI- 5261SE Rev. 4 with a 16 mm focal length lens and the thermal camera a FLIR TAU2 19 mm, spectral band 7.5–13.5 μm |
 |
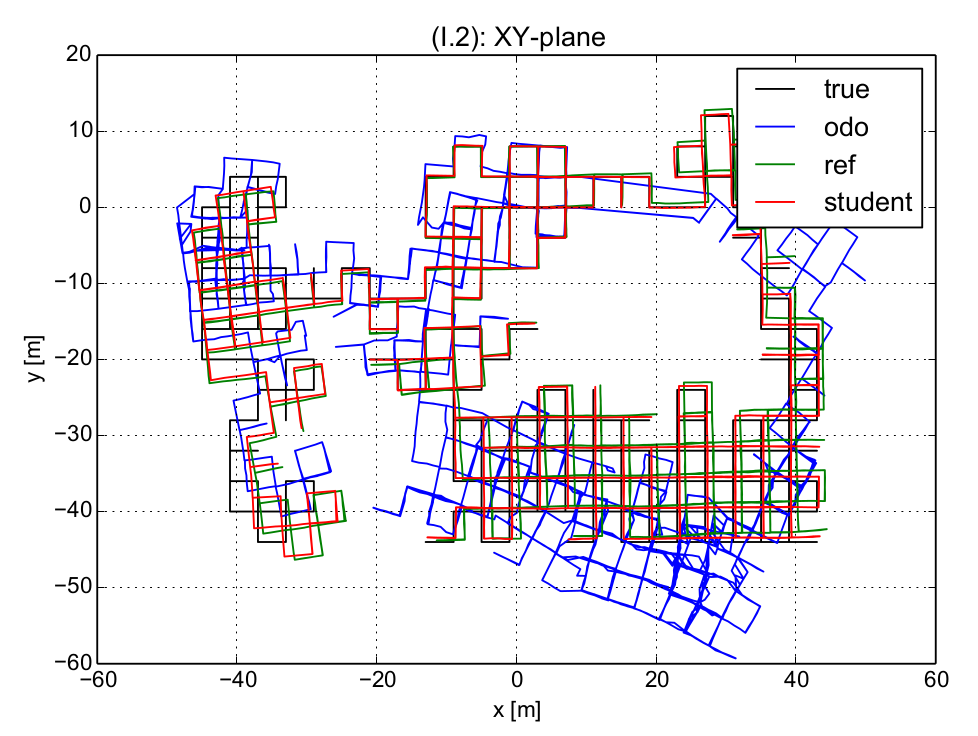
Vision & Laser Datasets From A Heterogeneous UAV Fleet Datasets consisting of optical and laser point clouds have been released for the robust_point_cloud_registration repository. |
 |
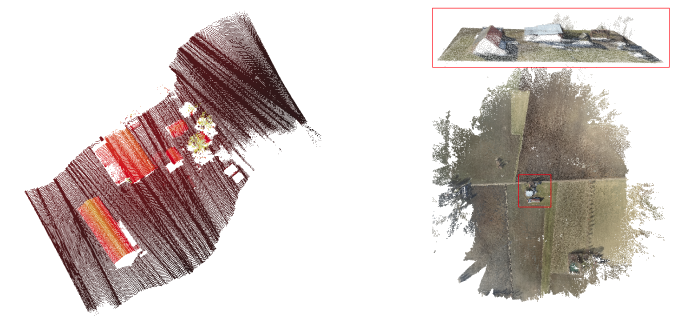
Aerial images and poses (synthetic and real-world) As part of the aerial_mapper repository, we released synthetic and real-world images with corresponding ground-truth and estimated camera poses, camera intrinsics, and distortion parameters to encourage the development of new algorithms and to reproduce the results. |
 |
AtlantikSolar 81-hour solar-powered flight dataset This is the dataset recorded from July 14th - 17th 2015 during AtlantikSolar's continuous solar-powered flight of 81-hours total duration. |
In case a link becomes unavailable please consult ASL's dataset website, ASL's code base, or write me an e-mail.