Publications
Scroll to dissertations |
Pascal Schoppmann, Pedro Proenca, Jeff Delaune, Michael Pantic, Timo Hinzmann, Roland Siegwart, Roland Brockers, "Multi-Resolution Elevation Mapping and Safe Landing Site Detection for an Autonomous UAV". IROS 2021. |
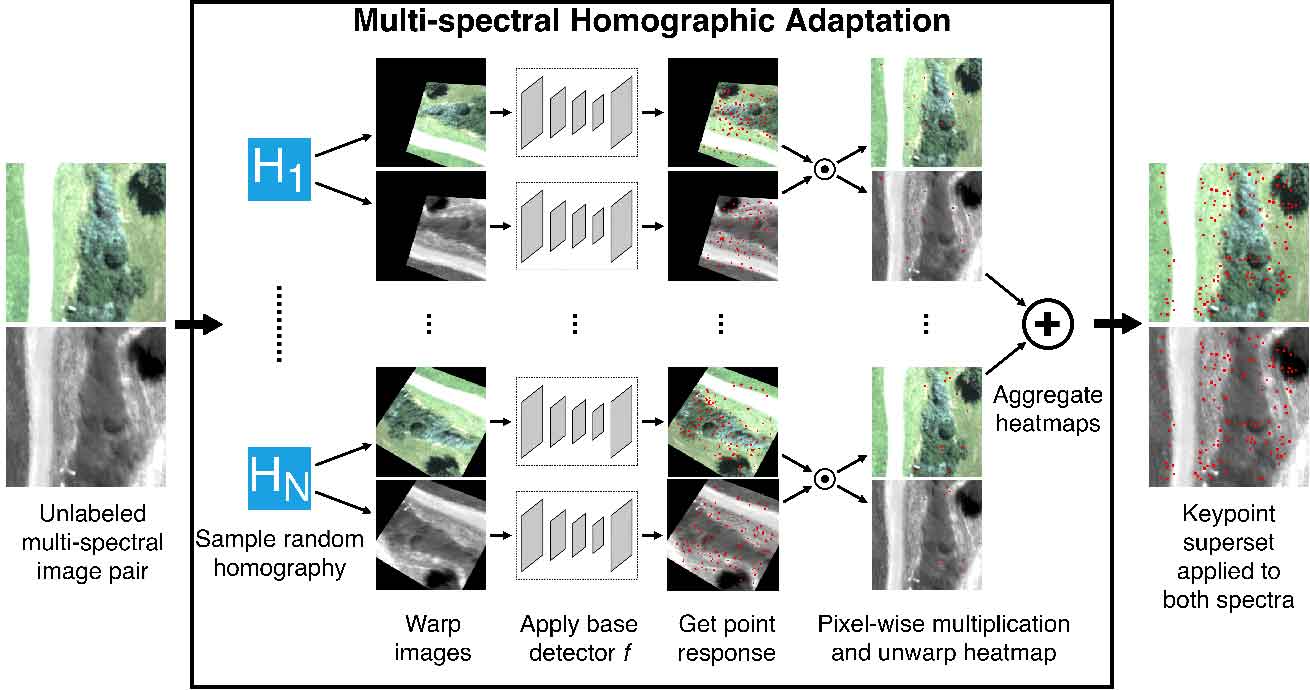 |
Florian Achermann, Andrey Kolobov, Debadeepta Dey, Timo Hinzmann, Jen Jen Chung, Roland Siegwart, Nicholas Lawrance, "MultiPoint: Cross-spectral registration of thermal and optical aerial imagery". CoRL 2020. |
 |
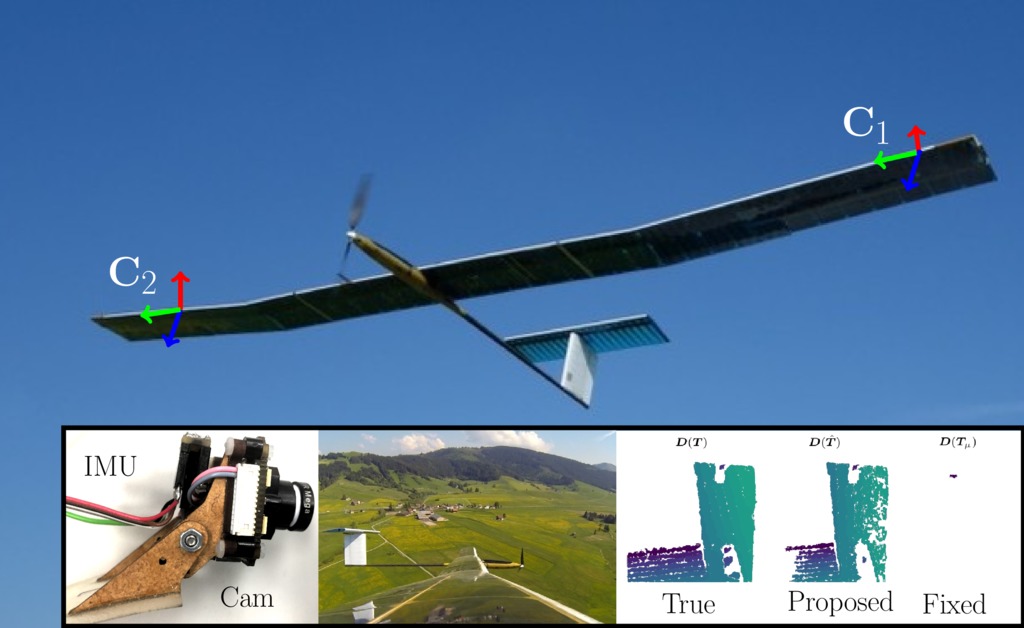
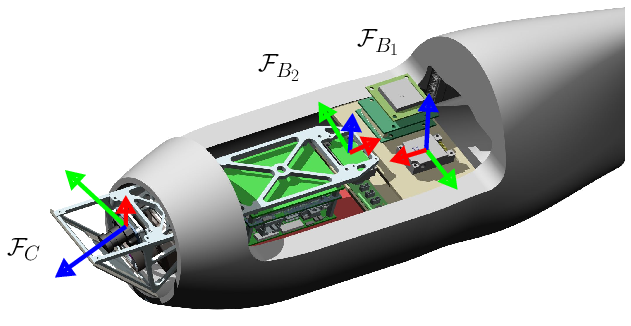
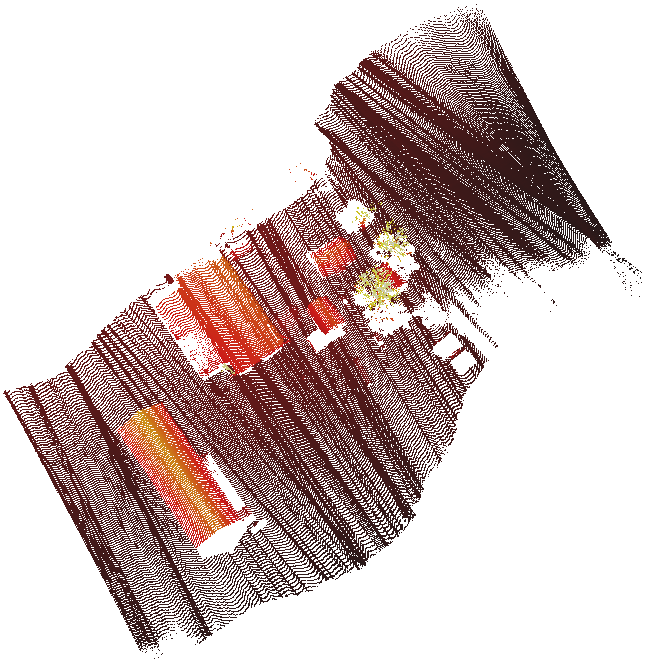
Timo Hinzmann, Cesar Cadena, Juan Nieto, Roland Siegwart, "Flexible Trinocular: Non-rigid Multi-Camera-IMU Dense Reconstruction for UAV Navigation and Mapping". IROS 2019. [PDF | Bibtex | Google Scholar] |
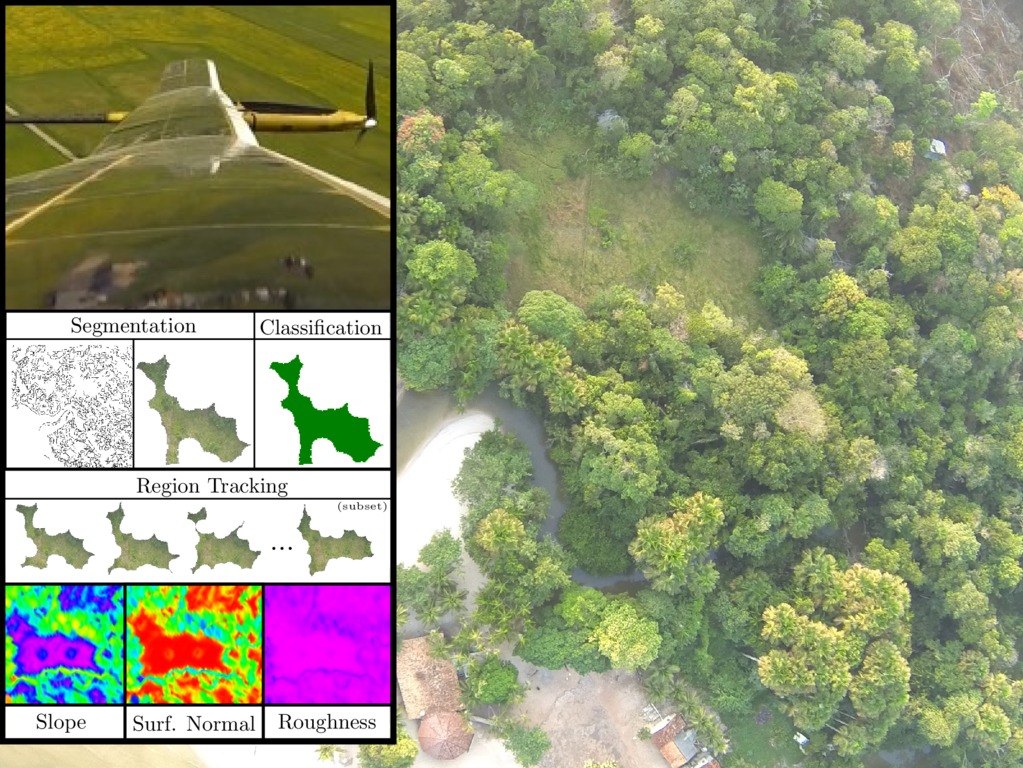 |
Timo Hinzmann, Thomas Stastny, Cesar Cadena Lerma, Roland Siegwart, Igor Gilitschenski, "Free LSD: Prior-Free Visual Landing Site Detection for Autonomous Planes". RA-L/ICRA 2018. [PDF | Bibtex | Video | Google Scholar] |
 |
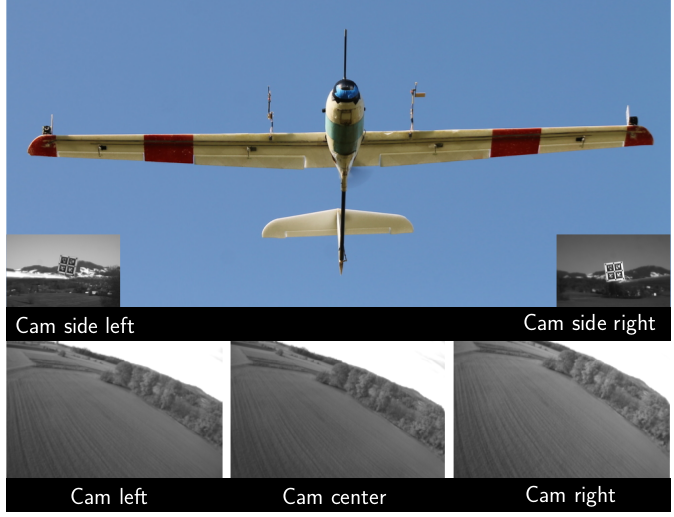
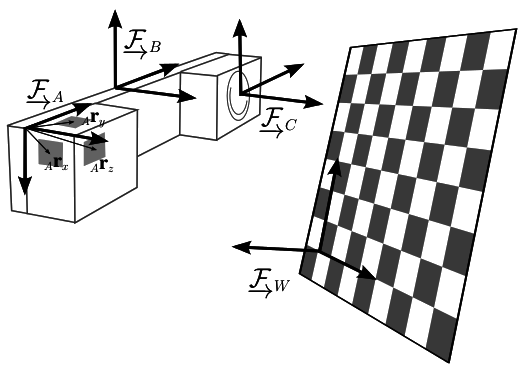
Timo Hinzmann, Tim Taubner, Roland Siegwart, "Flexible Stereo: Constrained, Non-rigid, Wide-baseline Stereo Vision for Fixed-wing Aerial Platforms". ICRA 2018. [PDF | Bibtex | Video | Google Scholar] |
 |
Ruben Mascaro, Lucas Teixeira, Timo Hinzmann, Roland Siegwart, Margarita Chli, "Graph-Optimization Based Multi-Sensor Fusion for Robust UAV Pose Estimation". ICRA 2018. [PDF | Bibtex | Video | Google Scholar] |
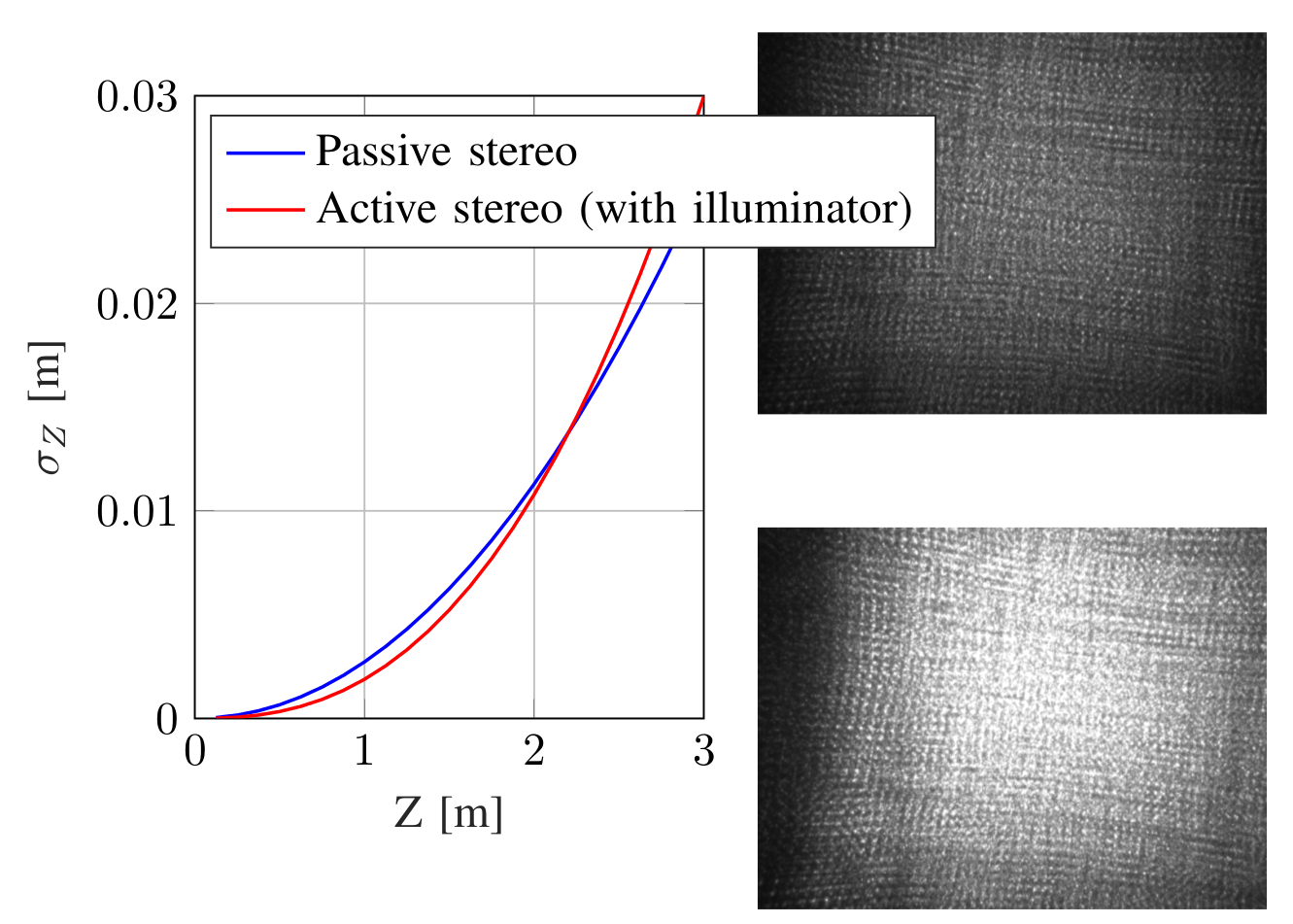 |
Marius Huber, Timo Hinzmann, Roland Siegwart, Larry Matthies, "Cubic Range Error Model for Stereo Vision with Illuminators". ICRA 2018. [PDF | Bibtex | Video | Google Scholar] |
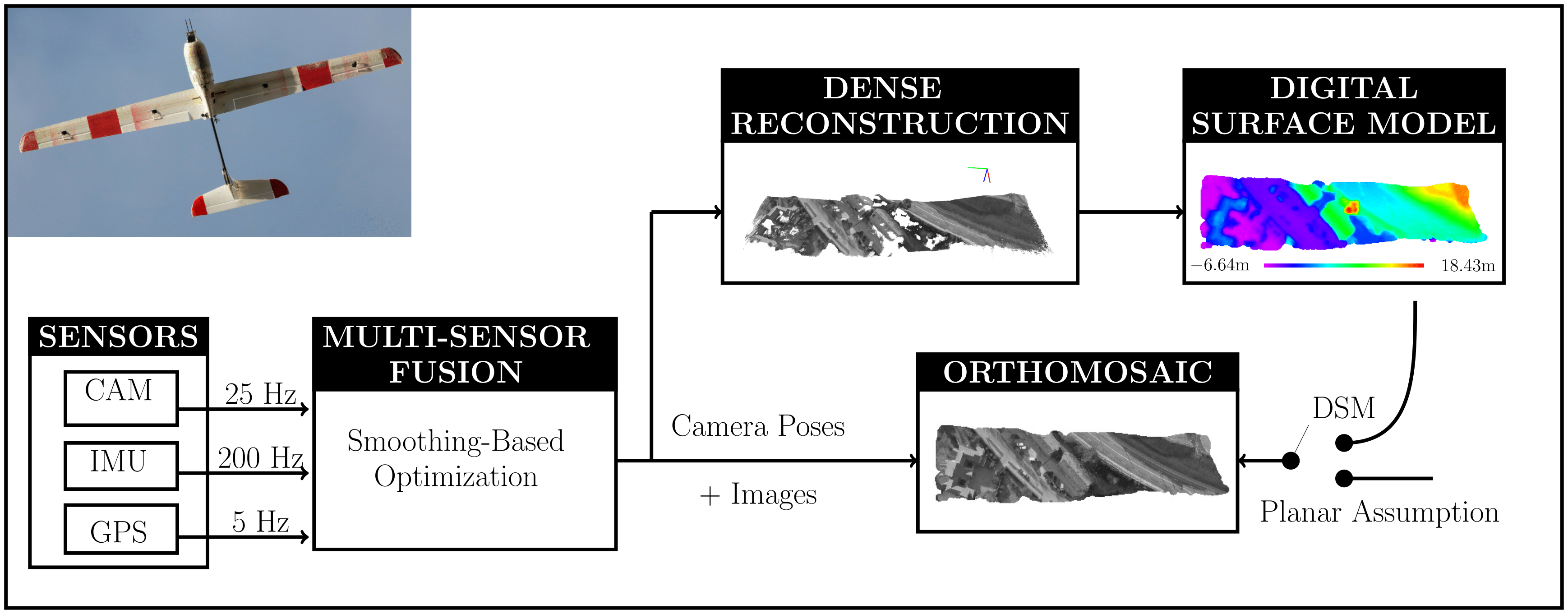 |
Timo Hinzmann, Johannes Schönberger, Marc Pollefeys, Roland Siegwart, "Mapping on the Fly: Real-Time 3D Dense Reconstruction, Digital Surface Map and Incremental Orthomosaic Generation for Unmanned Aerial Vehicles". FSR 2017. [PDF | Bibtex | Code | Google Scholar] |
 |
Philipp Oettershagen, Thomas Stastny, Timo Hinzmann, Konrad Rudin, Thomas Mantel, Amir Melzer, Bartosz Wawrzacz, Gregory Hitz, Roland Siegwart, "Robotic technologies for solar-powered UAVs: Fully autonomous updraft-aware aerial sensing for multiday search-and-rescue missions". JFR 2017. [PDF | Bibtex | Google Scholar] |
 |
Philipp Oettershagen, Amir Melzer, Thomas Mantel, Konrad Rudin, Thomas Stastny, Bartosz Wawrzacz, Timo Hinzmann, Stefan Leutenegger, Kostas Alexis, Roland Siegwart, "Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight". JFR 2017. [PDF | Bibtex | Video | Google Scholar] |
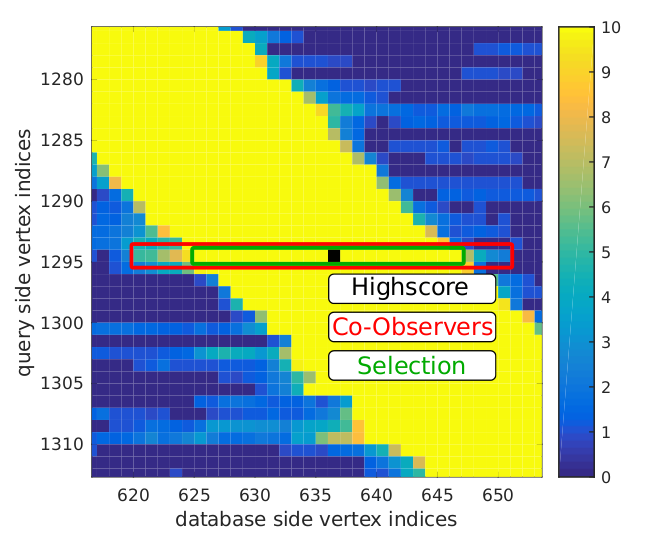 |
Mathias Gehrig, Elena Stumm, Timo Hinzmann, Roland Siegwart, "Visual Place Recognition with Probabilistic Vertex Voting". ICRA 2017. [PDF | Bibtex | Google Scholar] |
 |
Timo Hinzmann, Thomas Schneider, Marcin Dymczyk, Andreas Schaffner, Simon Lynen, Roland Siegwart, Igor Gilitschenski, "Monocular Visual-Inertial SLAM for Fixed-Wing UAVs Using Sliding Window Based Nonlinear Optimization". ISVC 2017. [PDF | Bibtex | Google Scholar] |
 |
Julius Kümmerle, Timo Hinzmann, Anurag Vempati, Roland Siegwart, "Real-Time Detection and Tracking of Multiple Humans from High Bird’s-Eye Views in the Visual and Infrared Spectrum". ISVC 2017. [PDF | Bibtex | Google Scholar] |
 |
Timo Hinzmann, Thomas Schneider, Marcin Tomasz Dymczyk, Amir Melzer, Thomas Mantel, Igor Gilitschenski, Roland Siegwart, "Robust Map Generation for Fixed-Wing UAVs with Low-Cost Highly-Oblique Monocular Cameras". IROS 2016 [PDF | Bibtex | Google Scholar] |
 |
Patrick Doherty, Jonas Kvarnström, Piotr Rudol, Marius Wzorek, Gianpaolo Conte, Cyrille Berger, Timo Hinzmann, Thomas Stastny, "A Collaborative Framework for 3D Mapping using Unmanned Aerial Vehicles". PRIMA 2016. [PDF | Bibtex | Datasets | Code | Google Scholar] |
 |
Philipp Oettershagen, Amir Melzer, Thomas Mantel, Konrad Rudin, Thomas Stastny, Bartosz Wawrzacz, Timo Hinzmann, Kostas Alexis, Roland Siegwart, "Perpetual flight with a small solar-powered UAV: Flight results, performance analysis and model validation". IEEE Aerospace Conference 2016. [PDF | Bibtex | Google Scholar] |
 |
Timo Hinzmann, Thomas Stastny, Gianpaolo Conte, Patrick Doherty, Piotr Rudol, Marius Wzorek, Igor Gilitschenski, Enric Galceran, Roland Siegwart, "Collaborative 3D Reconstruction using Heterogeneous UAVs: System and Experiments". ISER 2016. [PDF | Bibtex | Datasets | Code | Google Scholar] |
 |
Joern Rehder, Janosch Nikolic, Thomas Schneider, Timo Hinzmann, Roland Siegwart, "Extending kalibr: Calibrating the Extrinsics of Multiple IMUs and of Individual Axes". ICRA 2016 [PDF | Bibtex | Code | Google Scholar] |
Dissertations
Scroll to publicationsTimo Hinzmann, "Perception and Learning for Autonomous UAV Missions". Ph.D. Thesis, ETH Zurich, Autonomous Systems Lab. Defended in August 2020.
Supervisor: Prof. Dr. Roland Siegwart. Co-examiners: Prof. Dr. Margarita Chli (Vision for Robotics Lab, ETH Zurich) and Prof. Dr. Shaojie Shen (Dept. of Electronic & Computer Engineering, HKUST).
[View Cover | PDF | Bibtex | ETH Research Collection] | |
 |
|
 |
|
 |